Hoe werkt die Bucket-bot nu eigenlijk? Wat moet de elektrische schakeling doen om de Bucket-Bot bij een botsing ergens anders heen te laten gaan?
Bekijk het filmpje:
Heb je al een idee wat er gebeurt als de Bucket-Bot botst? Wat doen de schakelaartjes? Waarom draait de Bucket-Bot de ene keer linksom, en een andere keer rechtsom. Als je die antwoorden gevonden kan je de schakeling gaan bedenken.
Heb je nog nooit een stroomkring gemaakt? Bekijk dan eerst dit filmpje. En probeer eerst een stroomkring met schakelaar te maken als hieronder: Bucket-bot schakeling ontwerpen in 6 stappen.
Bucket-bot schakeling ontwerpen in 6 stappen.
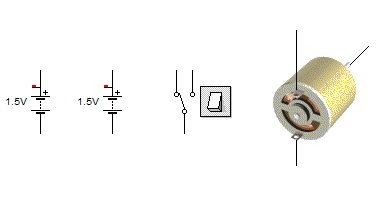
- Bedenk een schakeling waarbij de motor links- en rechtsom kan draaien. Je mag enkel de volgende onderdelen gebruiken :
- Eén wisselschakelaar,
- Eén motor,
- Twee 1,5 V batterijen,
- Snoertjes.
- Test de schakeling
- in Yenka, Crocodile Clips, of ander simulatieprogramma. Je moet dan het motortje kunnen zien draaien.
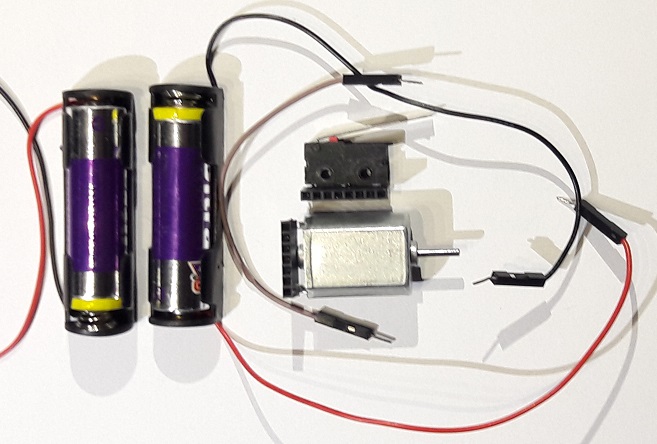
- Geen goed simulatieprogramma? Bouw dan even een testcircuit.
- Kopieer de schakeling voor je verslag (als je dat gaat maken).
- De Bucket-bot heeft 2 motoren en twee tastsensoren. Die tastsensoren zijn wisselschakelaars. Er komt nog één motor en één wisselschakelaar bij. Maak nu de schakeling zo dat met de tweede schakelaar de tweede motor ook links- en rechtsom kan draaien.
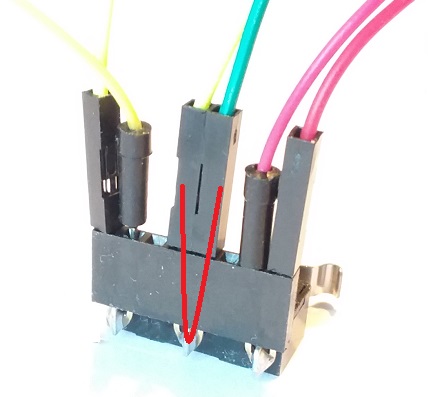
 Twee stekkertjes naast elkaar geeft een “doorverbinding”.
Twee stekkertjes naast elkaar geeft een “doorverbinding”. - Als je de Bucket-bot gaat solderen komen er nog twee aan-uit schakelaars bij die tussen de wisselschakelaar en het motortje komt.
- Nu je het schema hebt kan je de het zogenaamde bedradingsschema gaan maken. Klik hier voor printbaar werkblad.
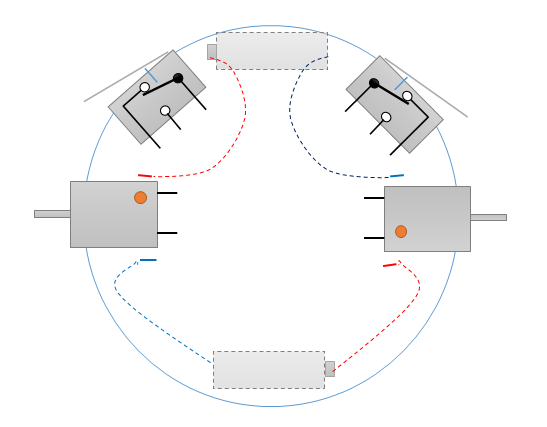 Als je gaat solderen is het verstandig eerst een tekening te maken. Als je de plus van de batterij aansluit op het motorlipje met de punt draait deze rechtsom met de klok mee.
Als je gaat solderen is het verstandig eerst een tekening te maken. Als je de plus van de batterij aansluit op het motorlipje met de punt draait deze rechtsom met de klok mee.
 Twee stekkertjes naast elkaar geeft een “doorverbinding”.
Twee stekkertjes naast elkaar geeft een “doorverbinding”.Dit is dan de Bucket-bot schakeling !!! Zelf bedacht!! (Hoop ik.)